



章魚是一種特殊的軟體動物,跟其他貝類不一樣,它的殼體已經退化消失,盡管對于其他肉食動物而言這就是行走的“多肉”,但這對它們來說并不完全算是一件壞事,因為它們可以輕松地鉆到珊瑚礁的縫隙里,加上它們的偽裝術,躲避敵人輕輕松松。
章魚柔軟的腕足成功地引起了人們的注意,它們的八根腕足可以非常靈活的運動,互不干擾,可以敏捷地抓捕不同形狀、不同尺寸的東西和各種生物如貝類、魚類、蟹類等。

圖片1 (圖片來源:搜狐·科技·飛碟說)
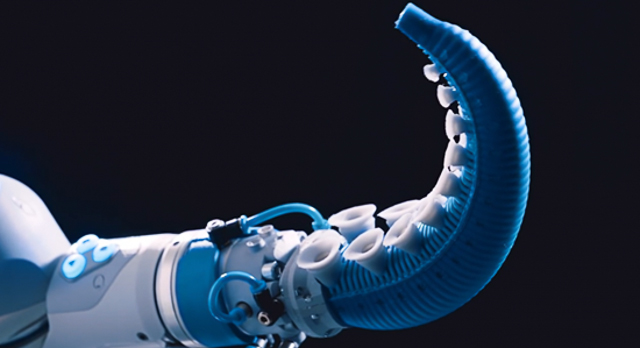
德國自動化設備供應商Festo一向對仿生機器人非常熱衷,在過去的很長一段時間里,Festo連續推出了十多款炫酷的仿生機器人,去年,Festo還推出了一款仿生黑科技機器人-章魚觸手(OctopusGripper)。

圖片2 (圖片來源:機器人網站)
章魚觸手由氣動的軟硅膠結構構成。接通壓縮的空氣后,觸角向內卷曲,并可以根據物體的外形、大小,輕柔地抓取物體。就像天然的章魚腕足一樣,硅膠章魚觸手的內側設計安裝有兩排吸盤。

圖片2 (圖片來源:新浪圖片)
圖片3 (圖片來源:機器人網站)
位于觸手末端的小型吸盤只是被動地發揮作用,而較大的吸盤就像章魚腕足上的吸盤一樣,收縮后形成近似真空的環境,外界壓強便會對吸盤吸附的區域產生強大的作用力,就可以牢固地抓住物體。

圖片4 (圖片來源:新浪圖片)
硅膠章魚觸手將吸附與纏繞兩種方式相結合,實現對多種不同形狀、不同尺寸、不同擺放姿態物體的安全、無損、穩定抓持。相比傳統剛性體機器人,仿生軟體觸手具備的柔性抓取特性使其可以更加有效率、安全地與人類和自然界進行交互。

圖片5 (圖片來源:新浪圖片)

圖片6 (圖片來源:新浪圖片)
該項目由Festo與北京航空航天大學文力副教授及其實驗室團隊歷時一年半合作完成,這也是Festo仿生學習網絡第一次與亞洲高校開展合作。對此次合作,文力副教授表示:“仿生軟體機器人是一項集材料、力學、生物學、自動化等多學科的交叉研究,也是目前國際學術界的前沿研究熱點。其未來應用除了工業抓持,還可以應用到家庭服務、醫療康復、智能穿戴等多個領域。”
貝類是仿生學的研究熱點,不知道接下來科學家們還能從貝類身上得到什么靈感而開發出一些令人驚奇的高科技產物呢?
(本文圖文資料來源:機器人網站、新浪圖片、搜狐·科技·飛碟說、騰訊視頻等)






 貝殼紅客服
貝殼紅客服